CARLA Tutorial
(updated July 2021) This is a simple tutorial of how to run CARLA headless on a remote Ubuntu GPU server. We will autopilot drive a car around for getting image frames and sensor data.
Webpage: https://arijitray1993.github.io/CARLA_tutorial/
Code Repo to follow along: https://github.com/arijitray1993/CARLA_tutorial
Installation on Ubuntu
There are various ways to install CARLA:
Easiest: Extract pre-computed binary file from their Github repo:
Extract the appropriate tar.gz file from https://github.com/carla-simulator/carla/blob/master/Docs/download.md.
Personally, on Ubuntu 16.04, 18.04 and 20.04, I have found version 9.10 and above to be unstable. Version 0.9.9 works perfectly for me without any compromise for features.
If you use the stable version - 0.8.2, you lose out on a lot of cool customization features.
- Extract the package.
- If you are on a Ubuntu machine with a display and just want to play around: run
./CarlaUE4.sh - If you do not have a display (remote server), and want to use the CARLA with a PythonAPI: run
DISPLAY= ./CarlaUE4.sh -opengl -carla-server -benchmark -fps=10
This will always run on GPU 0. If you need to run on another GPU, see below.
Second Easiest, but Recommended: Use Docker + NVIDIA-Docker**:
First, install Docker CE 20.10.5 (do not install 20.10.6, it will require IPv6 to be enabled, or will throw an error) and NVIDIA-Docker2. This needs CUDA>10. Follow instructions in install_docker.sh and install_nvidia_docker.sh in this repo.
After instaling, pull the carla image from dockerhub:
docker pull carlasim/carla:0.9.9
docker run -p 2000-2002:2000-2002 --runtime=nvidia -e NVIDIA_VISIBLE_DEVICES=0 carlasim/carla:0.9.9 /bin/bash CarlaUE4.sh -opengl –carla-server -benchmark -fps=10
Use the NVIDIA_VISIBLE_DEVICES=0 flag to choose your GPU number.
This should print stuff like:
4.24.3-0+++UE4+Release-4.24 518 0
Disabling core dumps.
sh: 1: xdg-user-dir: not found
This is fine, it means carla is running. To verify, run docker container ls and it should show a carla container running. If you don’t see anything, then it must have failed silently. Look at steps below.
Some common errors
Sometimes, the above command can give a segmentation fault with signal 11 and memory overflow (sometimes it fails silently).
Run the CARLA container in interactve mode and check the GPU:
docker run -p 2000-2002:2000-2002 --runtime=nvidia -e NVIDIA_VISIBLE_DEVICES=0 --name carla_container -it carlasim/carla:0.9.9 /bin/bash
nvidia-smi
Make sure there is only 1 GPU shown and it’s empty.
Inside the container, run
./CarlaUE4.sh -opengl -carla-server -benchmark -fps=10
If it still doesn’t work, you will probably need to try another version of CARLA - most likely a lower version.
Another option is to try the stable 0.8.2 version. It lacks functionality, but it has a verbose output when running the ./CarlaUE4.sh file. This can give you an idea of what might be going wrong.
If it seems to be working, proceed to the Python API tutorial section below.
Python API Tutorial
If you want, you can clone this repository: git clone https://github.com/arijitray1993/CARLA_tutorial.git and follow along in playground.ipynb.
Copy PythonAPI folder from the docker container
We need to copy the PythonAPI/ folder from inside the docker container in order to use it with Python. Python will communicate with the CARLA simulation running inside the docker container using the TCP ports 2000-2002.
docker cp carla_container:/home/carla/PythonAPI ./
This should replace the PythonAPI folder that you cloned from this repository. This is very important - make sure to copy the Python API from the container you are running and not from any other version.
Importing CARLA and miscellaneous packages
import glob
import os
import sys
try:
sys.path.append(glob.glob('PythonAPI/carla/dist/carla-*%d.%d-%s.egg' % (
sys.version_info.major,
sys.version_info.minor,
'win-amd64' if os.name == 'nt' else 'linux-x86_64'))[0])
except IndexError:
pass
import carla
import random
import cv2
import skimage.measure as measure
#in synchronous mode, sensor data must be added to a queue
import queue
Loading the CARLA World using the Python API
Connecting the Python Client on the 2000 PORT
client = carla.Client('localhost', 2000)
client.set_timeout(11.0)
CARLA is initiated using some pre-loaded maps that CARLA offers. To see all maps avaliable, do:
print(client.get_available_maps())
['/Game/Carla/Maps/Town02', '/Game/Carla/Maps/Town01', '/Game/Carla/Maps/Town03', '/Game/Carla/Maps/Town04', '/Game/Carla/Maps/Town05']
Loading Settings into CARLA world instance
Details for the maps can be found at https://carla.readthedocs.io/en/0.9.9/core_map/
Let’s first load a map and load into the CARLA world.
We need to run CARLA in synchronous mode to allow Python to keep up with the simulations. This is very important.
world = client.load_world('Town03')
settings = world.get_settings()
settings.fixed_delta_seconds = 0.05 #must be less than 0.1, or else physics will be noisy
#must use fixed delta seconds and synchronous mode for python api controlled sim, or else
#camera and sensor data may not match simulation properly and will be noisy
settings.synchronous_mode = True
world.apply_settings(settings)
928
Changing the weather
weather = carla.WeatherParameters(
cloudiness=20.0,
precipitation=20.0,
sun_altitude_angle=110.0)
#or use precomputed weathers
#weather = carla.WeatherParameters.WetCloudySunset
world.set_weather(weather)
Managing Objects in the world
Objects in the simulation are managed using blueprints. Blueprint is a template for an object and we can deploy an intantiation of any object we desire in the world. Let’s see some examples of blueprints available.
blueprints = world.get_blueprint_library().filter('*')
for blueprint in random.sample(list(blueprints), 5):
print(blueprint.id)
for attr in blueprint:
print(' - {}'.format(attr))
vehicle.lincoln.mkz2017
- ActorAttribute(id=number_of_wheels,type=int,value=4(const))
- ActorAttribute(id=sticky_control,type=bool,value=True)
- ActorAttribute(id=object_type,type=str,value=(const))
- ActorAttribute(id=color,type=Color,value=Color(15,11,44,255))
- ActorAttribute(id=role_name,type=str,value=autopilot)
static.prop.plastictable
- ActorAttribute(id=size,type=str,value=medium(const))
- ActorAttribute(id=role_name,type=str,value=prop)
static.prop.bench02
- ActorAttribute(id=size,type=str,value=medium(const))
- ActorAttribute(id=role_name,type=str,value=prop)
sensor.camera.rgb
- ActorAttribute(id=chromatic_aberration_intensity,type=float,value=0)
- ActorAttribute(id=white_clip,type=float,value=0.04)
- ActorAttribute(id=toe,type=float,value=0.55)
- ActorAttribute(id=shoulder,type=float,value=0.26)
- ActorAttribute(id=blur_radius,type=float,value=0)
- ActorAttribute(id=blur_amount,type=float,value=1)
- ActorAttribute(id=blade_count,type=int,value=5)
- ActorAttribute(id=min_fstop,type=float,value=1.2)
- ActorAttribute(id=exposure_speed_up,type=float,value=3)
- ActorAttribute(id=exposure_min_bright,type=float,value=0.1)
- ActorAttribute(id=motion_blur_min_object_screen_size,type=float,value=0.1)
- ActorAttribute(id=slope,type=float,value=0.88)
- ActorAttribute(id=motion_blur_max_distortion,type=float,value=0.35)
- ActorAttribute(id=motion_blur_intensity,type=float,value=0.45)
- ActorAttribute(id=enable_postprocess_effects,type=bool,value=True)
- ActorAttribute(id=temp,type=float,value=6500)
- ActorAttribute(id=iso,type=float,value=1200)
- ActorAttribute(id=tint,type=float,value=0)
- ActorAttribute(id=calibration_constant,type=float,value=16)
- ActorAttribute(id=shutter_speed,type=float,value=60)
- ActorAttribute(id=focal_distance,type=float,value=1000)
- ActorAttribute(id=exposure_compensation,type=float,value=3)
- ActorAttribute(id=exposure_mode,type=str,value=manual)
- ActorAttribute(id=lens_y_size,type=float,value=0.08)
- ActorAttribute(id=lens_x_size,type=float,value=0.08)
- ActorAttribute(id=lens_kcube,type=float,value=0)
- ActorAttribute(id=gamma,type=float,value=2.2)
- ActorAttribute(id=lens_k,type=float,value=-1)
- ActorAttribute(id=exposure_max_bright,type=float,value=2)
- ActorAttribute(id=fstop,type=float,value=1.4)
- ActorAttribute(id=lens_circle_multiplier,type=float,value=0)
- ActorAttribute(id=lens_circle_falloff,type=float,value=5)
- ActorAttribute(id=black_clip,type=float,value=0)
- ActorAttribute(id=fov,type=float,value=90)
- ActorAttribute(id=exposure_speed_down,type=float,value=1)
- ActorAttribute(id=image_size_y,type=int,value=600)
- ActorAttribute(id=image_size_x,type=int,value=800)
- ActorAttribute(id=sensor_tick,type=float,value=0)
- ActorAttribute(id=chromatic_aberration_offset,type=float,value=0)
- ActorAttribute(id=role_name,type=str,value=front)
static.prop.streetsign04
- ActorAttribute(id=size,type=str,value=small(const))
- ActorAttribute(id=role_name,type=str,value=prop)
Instantiating the Objects
First, it is a good practice to keep track of all objects being instantiated in a list. This is because objects dont die when the simulation ends, and we will need to destroy each of them if we desire to load a new world map.
actor_list = []
Next, we can instantiate objects as shown below and add them to the actor list.
Let’s first add our main vehicle
blueprint_library = world.get_blueprint_library()
bp = random.choice(blueprint_library.filter('vehicle')) # lets choose a vehicle at random
# lets choose a random spawn point
transform = random.choice(world.get_map().get_spawn_points())
#spawn a vehicle
vehicle = world.spawn_actor(bp, transform)
actor_list.append(vehicle)
vehicle.set_autopilot(True)
Now let’s add more vehicles
#lets create waypoints for driving the vehicle around automatically
m= world.get_map()
waypoint = m.get_waypoint(transform.location)
#lets add more vehicles
for _ in range(0, 200):
transform = random.choice(m.get_spawn_points())
bp_vehicle = random.choice(blueprint_library.filter('vehicle'))
# This time we are using try_spawn_actor. If the spot is already
# occupied by another object, the function will return None.
other_vehicle = world.try_spawn_actor(bp_vehicle, transform)
if other_vehicle is not None:
#print(npc)
other_vehicle.set_autopilot(True)
actor_list.append(other_vehicle)
Let’s also add some weird objects.
# Adding random objects
blueprint_library = world.get_blueprint_library()
weirdobj_bp = blueprint_library.find('static.prop.fountain')
weirdobj_transform = random.choice(world.get_map().get_spawn_points())
weirdobj_transform = carla.Transform(carla.Location(x=230, y=195, z=40), carla.Rotation(yaw=180))
weird_obj = world.try_spawn_actor(weirdobj_bp, weirdobj_transform)
actor_list.append(weird_obj)
Adding Sensors to Vehicles
Let’s add a camera, depth camera and a semantic segmentation camera to the main vehicle we defined above in the variable vehicle.
Attaching camera and depth camera for semantic segmentation to a vehicle
#example for getting camera image
camera_bp = blueprint_library.find('sensor.camera.rgb')
camera_transform = carla.Transform(carla.Location(x=1.5, z=2.4))
camera = world.spawn_actor(camera_bp, camera_transform, attach_to=vehicle)
image_queue = queue.Queue()
camera.listen(image_queue.put)
actor_list.append(camera)
#example for getting depth camera image
camera_depth = blueprint_library.find('sensor.camera.depth')
camera_transform = carla.Transform(carla.Location(x=1.5, z=2.4))
camera_d = world.spawn_actor(camera_depth, camera_transform, attach_to=vehicle)
image_queue_depth = queue.Queue()
camera_d.listen(image_queue_depth.put)
actor_list.append(camera_d)
#example for getting semantic segmentation camera image
camera_semseg = blueprint_library.find('sensor.camera.semantic_segmentation')
camera_transform = carla.Transform(carla.Location(x=1.5, z=2.4))
camera_seg = world.spawn_actor(camera_semseg, camera_transform, attach_to=vehicle)
image_queue_seg = queue.Queue()
camera_seg.listen(image_queue_seg.put)
actor_list.append(camera_seg)
Some helper functions we will need later. Feel free to skip this for now to the next section.
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import pycocotools
import math
from scipy.spatial import distance
def get_mask(seg_im, rgb_value):
# rgb_value should be somethiing like np.uint8([[[70, 70, 70]]])
# seg_im should be in HSV
hsv_value = cv2.cvtColor(rgb_value, cv2.COLOR_RGB2HSV)
hsv_low = np.array([[[hsv_value[0][0][0]-5, hsv_value[0][0][1], hsv_value[0][0][2]-5]]])
hsv_high = np.array([[[hsv_value[0][0][0]+5, hsv_value[0][0][1], hsv_value[0][0][2]+5]]])
mask = cv2.inRange(seg_im, hsv_low, hsv_high)
return mask
def get_bbox_from_mask(mask):
label_mask = measure.label(mask)
props = measure.regionprops(label_mask)
return [prop.bbox for prop in props]
Running the simulation to get data
world.tick() runs one step of the simulation.
## get location of weird obj
world.tick()
Getting camera data
Let’s get the data from the queues we defined to push data into while setting up the cameras.
#rgb camera
image = image_queue.get()
#semantic segmentation camera
image_seg = image_queue_seg.get()
#depth camera
image_depth = image_queue_depth.get()
We can now save the camera images to file.
image.save_to_disk("test_images/%06d.png" %(image.frame))
image_seg.save_to_disk("test_images/%06d_semseg.png" %(image.frame), carla.ColorConverter.CityScapesPalette)
image_depth.save_to_disk("test_images/%06d_depth.png" %(image.frame), carla.ColorConverter.LogarithmicDepth)
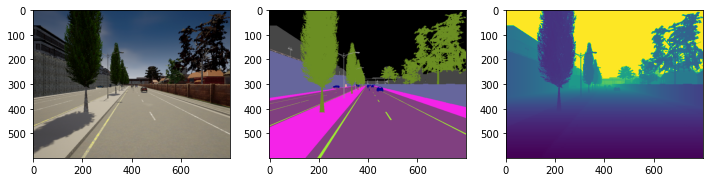
Let’s visualize these images
img = mpimg.imread("test_images/%06d.png" % image.frame)
img_semseg = mpimg.imread("test_images/%06d_semseg.png" % image.frame)
img_depth = mpimg.imread("test_images/%06d_depth.png" % image.frame)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize = (12,18))
ax1.imshow(img)
ax2.imshow(img_semseg)
ax3.imshow(img_depth)
plt.show()
Interpreting the Segmentation Maps
Let’s first read the segmentation maps in HSV color space since it is easier to process color-based segmentation in that format.
img_semseg_bgr = cv2.imread("test_images/%06d_semseg.png" % image.frame)
img_semseg_bgr = cv2.cvtColor(img_semseg_bgr, cv2.COLOR_BGRA2BGR)
img_semseg_hsv = cv2.cvtColor(img_semseg_bgr, cv2.COLOR_BGR2HSV) # color wise segmentation is better in hsv space
In the segmentation image, CARLA currently supports only certain objects and not all the objects we listed in the blueprint. The list of supported objects are at https://carla.readthedocs.io/en/0.9.9/ref_sensors/. Shown below are the BGR values for some of the common supported objects we could be interested in.
#bgr value exmaples of few objects: full list at https://carla.readthedocs.io/en/0.9.9/ref_sensors/
object_list = dict()
object_list['building'] = np.uint8([[[70, 70, 70]]])
object_list['pedestrian'] = np.uint8([[[220, 20, 60]]])
object_list['vegetation'] = np.uint8([[[107, 142, 35]]])
object_list['car'] = np.uint8([[[ 0, 0, 142]]])
object_list['fence'] = np.uint8([[[ 190, 153, 153]]])
object_list['traffic_sign'] = np.uint8([[[220, 220, 0]]])
object_list['pole'] = np.uint8([[[153, 153, 153]]])
object_list['wall'] = np.uint8([[[102, 102, 156]]])
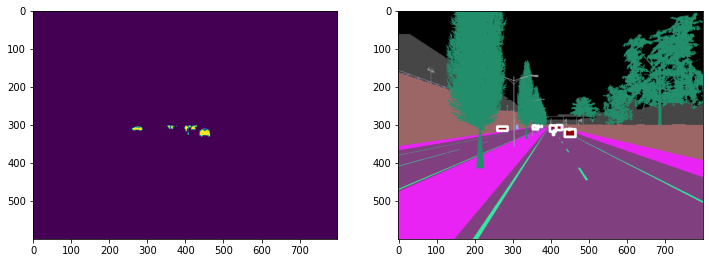
As an example, let’s get the bounding boxes of cars from the segmentation images
Refer to the helper functions get_mask and get_bbox_from_mask we defined above.
get_mask() isolates the object’s mask from the segmentation image.
get_bbox_from_mask() computes the bounding boxes from the isolates object’s mask.
mask = get_mask(img_semseg_hsv, object_list['car'])
bboxes = get_bbox_from_mask(mask)
Let’s visualize the car segmentation mask and the bboxes
fig, (ax1, ax2) = plt.subplots(1, 2, figsize = (12,18))
ax1.imshow(mask)
for bbox in bboxes:
minr, minc, maxr, maxc = bbox
cv2.rectangle(img_semseg_bgr, (minc,minr), (maxc, maxr), (255,255,255), 6)
ax2.imshow(img_semseg_bgr)
plt.show()
ToDo: Get Bounding boxes for unsupported objects (eg, fountains)
Currently, we can get the global coordinates of the object using get_location() or get_transform().
weirdobj_loc = weird_obj.get_location()
# returns x, y, z as weirdobj_loc.x, weirdobj_loc.y, weirdobj_loc.z
weirdobj_transform = weird_obj.get_transform()
# returns x, y, z as weirdobj_transform.location.x, weirdobj_transform.location.y, weirdobj_transform.location.z
# also returns pitch, yaw, roll as weirdobj_transform.rotation.pitch, weirdobj_transform.rotation.yaw, weirdobj_transform.rotation.roll
#similarly we can get the camera transform
camera_transform = camera.get_transform()
From the CARLA documentation, we also know that the camera has a field of view angle of 90 degrees as default. We need to somehow map the global coordinates to camera field of view 2-D coordinates. I will update this soon, or if you do it sooner, feel free to fork it or submit a pull request.
Driving the vehicle
In order to auto-pilot the vehicle to just drive around and get data, we can choose the next random waypoint on the map and set the vehicle location to that waypoint.
waypoint = random.choice(waypoint.next(1.5)) #navigate to next waypoint on map 1.5 meters ahead
vehicle.set_transform(waypoint.transform)
Now, we can repeat the steps above to get the sensor data again.
We can also control the vehicle’s acceleration and steering using python. This is especially useful if you would like an AI agent to control the vehicle. I will update how to do so soon.
Optional: Now, let’s put this in a for loop and collect some data in MS COCO format
dataset_dicts will contain the data in MS-COCO format. You can save that as a json file. However, the file can become very large. So, you can also save a separate file for each image.
from detectron2.structures import BoxMode
#in sychronous mode, client controls step of simulation and number of steps
dataset_dicts = []
global_count=0
for i in range(100):
#step
world.tick()
#rgb camera
image = image_queue.get()
#semantic segmentation camera
image_seg = image_queue_seg.get()
#image_seg.convert(carla.ColorConverter.CityScapesPalette)
#depth camera
image_depth = image_queue_depth.get()
#image_depth.convert(carla.ColorConverter.LogarithmicDepth)
if i%10==0:
image.save_to_disk("test_images/%06d.png" %(image.frame))
image_seg.save_to_disk("test_images/%06d_semseg.png" %(image.frame), carla.ColorConverter.CityScapesPalette)
image_depth.save_to_disk("test_images/%06d_depth.png" %(image.frame), carla.ColorConverter.LogarithmicDepth)
img = mpimg.imread("test_images/%06d.png" % image.frame)
img_semseg = mpimg.imread("test_images/%06d_semseg.png" % image.frame)
img_depth = mpimg.imread("test_images/%06d_depth.png" % image.frame)
## COCO format stuff, each image needs to have these keys
height, width = cv2.imread("test_images/%06d.png" %(image.frame)).shape[:2]
record = {}
record['file_name'] = "test_images/%06d.png" %(image.frame)
global_count+=1
record['image_id'] = global_count
record['height'] = height
record['width'] = width
fig, (ax1, ax2, ax3, ax4, ax5) = plt.subplots(1, 5, figsize = (12,18))
ax1.imshow(img)
ax2.imshow(img_semseg)
ax3.imshow(img_depth)
## compute bboxes from semseg
img_semseg_bgr = cv2.imread("test_images/%06d_semseg.png" % image.frame)
img_semseg_bgr = cv2.cvtColor(img_semseg_bgr, cv2.COLOR_BGRA2BGR)
img_semseg_hsv = cv2.cvtColor(img_semseg_bgr, cv2.COLOR_BGR2HSV) # color wise segmentation is better in hsv space
#bgr value exmaples of few objects: full list at https://carla.readthedocs.io/en/0.9.9/ref_sensors/
object_list = dict()
object_list['building'] = np.uint8([[[70, 70, 70]]])
object_list['pedestrian'] = np.uint8([[[220, 20, 60]]])
object_list['vegetation'] = np.uint8([[[107, 142, 35]]])
object_list['car'] = np.uint8([[[ 0, 0, 142]]])
object_list['fence'] = np.uint8([[[ 190, 153, 153]]])
object_list['traffic_sign'] = np.uint8([[[220, 220, 0]]])
object_list['pole'] = np.uint8([[[153, 153, 153]]])
object_list['wall'] = np.uint8([[[102, 102, 156]]])
object_bboxes = dict()
objects = []
obj_id = 0
obj2id = dict()
for obj in object_list:
mask = get_mask(img_semseg_hsv, object_list[obj])
bboxes = get_bbox_from_mask(mask)
object_bboxes[obj] = bboxes
#let's visualize car bboxes
if obj=='car':
ax4.imshow(mask)
for bbox in bboxes:
minr, minc, maxr, maxc = bbox
cv2.rectangle(img_semseg_bgr, (minc,minr), (maxc, maxr), (255,255,255), 6)
ax5.imshow(img_semseg_bgr)
#lets put things in coco format for finetuning mask rcnn
for bbox in bboxes:
minr, minc, maxr, maxc = bbox
obj_mask = np.copy(mask)
obj_mask[:minr] = 0
obj_mask[:, :minc] = 0
obj_mask[maxr+1:] = 0
obj_mask[:, maxc+1:] = 0
coco_rle_mask = pycocotools.mask.encode(np.array(obj_mask, order="F"))
obj_ann = {
'bbox': [minc, minr, maxc, maxr],
'bbox_mode': BoxMode.XYXY_ABS,
'segmentation': coco_rle_mask,
'category_id': obj_id
}
objects.append(obj_ann)
obj_id+=1
obj2id[obj] = obj_id
record['annotations'] = objects
print(record)
dataset_dicts.append(record)
#plt.show()
#drive vehicle to next waypoint on map
waypoint = random.choice(waypoint.next(1.5))
vehicle.set_transform(waypoint.transform)
Finally, we need to destroy all the actors in the simulation
#make sure to destroy all cameras and actors since they remain in the simulator even if you respawn using python.
#It gets destroyed only if you restart CARLA simulator
camera.destroy()
camera_d.destroy()
camera_seg.destroy()
client.apply_batch([carla.command.DestroyActor(x) for x in actor_list])